Notes-Part-1
|
Topics to be Learn : Part-1
|
Periodic motion : A motion that repeats itself at definite intervals of time is said to be a periodic motion.
- Periodic time : Body performing periodic motion goes on repeating the same set of movements. The time taken for one such set of movements is called its period or periodic time.
- Examples : Up and down motion of the needle of a sewing machine, the motion of the prongs of a vibrating tuning fork, oscillations of a spring, The motion of the hands of a clock, the motion of the Earth around the Sun. etc.
Oscillatory motion : A periodic motion in which a body moves back and forth over the same path, straight or curved, between alternate extremes is said to be an oscillatory motion.
- Examples : The motion of a taut string when plucked, the vibrations of the atoms in a molecule, the oscillations of a simple pendulum.
- The oscillatory motion of a particle is also called a harmonic motion when its position, velocity and acceleration can be expressed in terms of a periodic, sinusoidal functions—sine or cosine, of time.
Linear simple harmonic motion (SHM) : It is defined as the linear periodic motion of a body, in which the force (or acceleration) is always directed towards the mean position and its magnitude is proportional to the displacement from the mean position.
OR
A particle is said to execute linear SHM if the particle undergoes oscillations about a point of stable equilibrium, subject to a linear restoring force always directed towards that point and whose magnitude is proportional to the magnitude of the displacement of the particle from that point.
- Examples : The vibrations of the tines (prongs) of a tuning fork, the oscillations of the needle of a sewing machine.
Spring-and-block oscillator : Consider a spring-and-block oscillator as shown in Fig. in which the block slides on a frictionless horizontal surface. The spring has a relaxed length when the block is at rest at the position B, Fig.(b). The block is then displaced to A by an amount x measured from the equilibrium position B, Fig.(a). Upon releasing, the unbalanced force \(\vec{F}\) = \(−k\vec{x}\) toward left accelerates the block and its speed increases. As x gets smaller, |\(\vec{F}\) | and the acceleration decrease proportionately. k is the elastic constant of the spring called the force constant or spring constant. At the instant the block passes through the point B, |F | = 0 because x = 0; although there is no acceleration, the speed is maximum. As soon as the block passes B going to the left, the force on the block and its acceleration increases to the right, because the spring is now compressed. Eventually, the block is brought to rest momentarily at the point C. Then on, the subsequent motion is the same as the motion from A to C, with all directions reversed. The acceleration of the block is a = F/m = \(−\frac{k}{m}x\) , where m is the mass of the block. This shows that the acceleration is also proportional to the displacement and its direction is opposite to that of the displacement, i.e., the force and acceleration are both directed towards the mean or equilibrium position. The motion repeats causing the block to oscillate about equilibrium or mean position O. This oscillatory motion along a straight path is called linear simple harmonic motion (SHM). The points A and C are called the extreme positions or the turning points of the motion. One oscillation is a complete to-and-fro motion of the oscillating body (block, in this case) along its path (the motion from B to A, A to C and C to B), i.e., two consecutive passages of the body through the point B in the same direction.

Q. If there is friction between a block and the resting surface, how will it govern the motion of the block ?
Ans. The amplitude of the motion will steadily decrease, so that the motion will be periodic but not simple harmonic.
| Remember :
*In SHM always measure the displacement from the mean position. *As the entire motion is along a single straight line, we need not use vector notation (only ± signs will be enough). *One oscillation is a complete to—and—fro motion of the oscillating body along its path—from the mean position to one extreme position, to the other extreme, and back to the mean position—that is, two consecutive passages of the body through the mean position in the same direction. *For a simple harmonic motion of a particle,
*A simple harmonic oscillation is one whose displacement from the mean position can be expressed in terms of a harmonic function—a sine function (a sin ωt) or a cosine function (b cos ωt) or a sum of the two (a sin ωt + b cos ωt). In an unharmonic oscillation, the restoring force depends non-linearly on the displacement. |
In linear SHM :
- When the speed of the particle is zero the restoring force is maximum
- When the speed of the particle is maximum the restoring force is zero.
Period or periodic time of SHM : The time taken by a particle performing simple harmonic motion to complete one oscillation is called the period or periodic time of SHM.
Frequency of SHM : The number of oscillations performed per unit time by a particle executing SHM is called the frequency of SHM.
- The frequency of SHM is equal to the reciprocal of the period of SHM.
Amplitude of SHM : The magnitude of the maximum displacement of a particle performing SHM from its mean position is called the amplitude of SHM.
Path length Of SHM : The length of the path over which a particle performs SHM is twice the amplitude of the motion and is called the path length or range of the SHM.
Differential Equation of S.H.M. : When a particle performs linear SHM, the force acting on the particle is always directed towards the mean position. The magnitude of the force is directly proportional to the magnitude of the displacement of the particle from the mean position. Thus, if F is the force acting on the particle when its displacement from the mean position is x, F = − kx According to Newton’s second law of motion, F = ma ∴ ma = − kx ….. (1) The velocity of the particle is, v = dx/dt and its acceleration, a = dv/dt = d2x/dt2 Substituting it in Eq. (1), we get \(m\frac{d^2x}{dt^2}\) = − kx \(∴ \frac{d^2x}{dt^2}+\frac{k}{m}x=0\) ….. (2) Substituting k/m = ω2, where ω is the angular frequency, \(∴ \frac{d^2x}{dt^2}+ω^2x=0\) This is the differential equation of linear S.H.M.
Q. Why is the term angular frequency (w)) used here for a linear motion?
A linear SHM is the projection of a UCM on a diameter of the circle. The angular speed w of a particle moving along this reference circle is called the angular frequency of the particle executing linear SHM.
Acceleration (a), Velocity (v) and Displacement (x) of S.H.M. : The differential equation of linear SHM is\(\frac{\vec{d^2x}}{dt^2}+ω^2\vec{x}=0\) where m = mass of the particle performing SHM \(\frac{d^2x}{dt^2}\) = acceleration of the particle when its displacement from the mean position is x and k = force constant. For linear motion, we can write the differential equation in scalar form \(\frac{d^2x}{dt^2}+ω^2x=0\) Let k/m = ω2 , a constant. ∴ acceerat1on, a = d2x/dt2 = −ω2x …....(1) The minus sign shows that the acceleration and the displacement have opposite directions. Writing v = dx/dt as the velocity of the particle. Hence, Eq. (1) can be written as \(a=\frac{d^2x}{dt^2}=\frac{dv}{dt}=\frac{dv}{dx}⋅\frac{dx}{dt}=\frac{dv}{dx}⋅v =v⋅\frac{dv}{dx}\)= −ω2x ∴ v.dv = −ω2x dx Integrating this expression, we get, \(\frac{v^2}{2}=−\frac{ω^2x^2}{2}+C\) where the constant of integration C is found from a boundary condition. At an extreme position (a turning point of the motion), the velocity of the particle is zero. Thus, v = 0 when x = ± A, where A is the amplitude. ∴ 0 =(−\frac{ω^2A^2}{2}+C\) ∴ C =(\frac{ω^2A^2}{2}\) ∴\(\frac{v^2}{2}=−\frac{ω^2x^2}{2}+\frac{ω^2A^2}{2}\) ∴ v2 = ω2(A2 - x2) ∴ v = ±ω\(\sqrt{A^2-x^2}\) ….. (2) This equation gives the velocity of the particle in terms of the displacement, x. The velocity towards right is taken to be positive and that towards left as negative. Since, v = dx/dt, we can write Eq. (2) as follows : \(\frac{dx}{dt}\)= ω\(\sqrt{A^2-x^2}\) ..... (considering only the plus sign) ∴ \(\frac{dx}{\sqrt{A^2-x^2}}\)= ωdt Integrating this expression, we get, sin−1(x/A) = ωt + α …… (3) where the constant of integration, α, is found from the initial conditions, i.e., the displacement and the velocity of the particle at time t = 0. From Eq. (3), we have x/A = sin(ωt + a) ∴ Displacement as a function of time is, x = A sin(ωt + a)
Angular frequency of a body performing linear SHM :
When a body of mass m performs linear SHM, the restoring force on it is always directed towards the mean position and its magnitude is directly proportional to the magnitude of the displacement of the body from the mean position. Thus, if F is the force acting on the body when its displacement from the mean position is x,
F = ma = − kx
where the constant k, the force per unit displacement, is the force constant.
Let k/m = ω2, a constant.
∴ Acceleration, a = \(−\frac{k}{m}x\) = − ω2x
The angular frequency,
ω =\(\sqrt{\frac{k}{m}}=\sqrt{\left |\frac{a}{x}\right |}\)
= \(\sqrt{\text{acceleration per unit displacement}}\)
Expressions for the displacement when the particle starts from (i) the mean position (ii) an extreme position : The displacement of a particle performing linear SHM is a specified distance of the particle from the mean position in a specified direction along its path. The general expression for the displacement is x = A sin(ωt + α) ….. (1) where A and w are respectively the amplitude or maximum displacement and the angular frequency of the motion, and a is the initial phase. \(v=\frac{dx}{dt}=\frac{d}{dt}[A sin(ωt + α)]\) ∴ ωt + α = sin-1(x/A) ….. (2) Case (i) When the particle starts from the mean position, x = 0 at t= 0. Then, from Eq.(2), α = sin−10 = 0 or π …..(3) Substituting for α into Eq. (1), x = A sin ωt ... for α = 0 and x= − A sin ωt ....for α = π ∴ x = ± A sin ωt ….(4) where the plus sign is taken if the particle's initial velocity is to the right, while the minus sign is taken when the initial velocity is to the left. Case (ii) If the particle starts S.H.M. from the extreme position : x= ± A at t = 0 when the particle starts from the right or left extreme position, respectively. Then, from Eq. (2), α = sin-11 = π/2 or α = sin-1(-1) = 3π/2 ……..(5) Substituting for α into Eq. (1), x = A sin(ωt + π/2) = A cos ωt …for α = π/2 x = A sin(ωt + 3π/2) = − A cos ωt …..for α = 3π/2 ∴ x = ± A cos ωt ……..(6) where the plus sign is taken when the particle starts from the positive extreme, while the minus sign is taken when the particle starts from the negative extreme.
Obtaining expression for (a) velocity (b) acceleration in SHM, by using the differential equation of linear SHM : The general expression for the displacement of a particle in SHM at time t is x = A sin(ωt + α) ….. (1) where A and ω is a constant in a particular case and α is the initial phase. The velocity of the particle is \(v=\frac{dx}{dt}=\frac{d}{dt}[A sin(ωt + α)]\) = ωA cos(ωt + α) = \(ωA\sqrt{1-sin^2(ωt + α)}\) From Eq. (1), sin(ωt + α) = x/A \(v=ωA\sqrt{1-\frac{x^2}{A^2}}\) ∴ \(v=ω\sqrt{A^2-x^2}\) …… (2) Equation (2) gives the velocity as a function of x The acceleration of the particle is a= \(\frac{dv}{dt}=\frac{d}{dt}\)[Aω cos(ωt + α)] ∴ a = − ω2A sin(ωt + α) But from Eq. (1), A sin(ωt + α) = x ∴ a = − ω2x ……. (3) Equation (3) gives the acceleration as a function of x. The minus sign shows that the direction of the acceleration is opposite to that of the displacement. Extreme values of velocity (v) and acceleration (a): Velocity: According to Eq. (2) from above the magnitude of velocity of the particle performing S.H.M. is v = ±\(ω\sqrt{A^2−x^2}\) At the mean position, x = 0, ∴ vmax = ωA Thus, the velocity of the particle in S.H.M. is maximum at the mean position. At the extreme position, x = ± A , ∴ vmin = 0 Thus, the velocity of the particle in S.H.M. is minimum at the extreme positions. Acceleration: The magnitude of the acceleration of a particle performing SHM is a = ω2x ……(1) where w is a constant related to the system. From Eq. (1), the acceleration has a maximum value amax when displacement x is maximum, |x| =A, i.e., the particle is at the extreme positions. ∴ amax = ω2A Also from Eq. (1), the acceleration has a minimum value amin when x is minimum, x = 0, i.e., the particle is at the mean position. ∴ amin = 0
Q. Show that the average speed of a particle performing SHM in one oscillation is maximum speed.
Ans. During one oscillation, a Particle performing SHM covers a total distance equal to 4A, where A is the amplitude of SHM. The time taken to cover this distance is the period (T) of SHM. Average speed =\(\frac{\text{Distance covered in one ocillation}{Time taken for one oscillation}\) ∴ \(v_{av}=\frac{4A}{T}\) But T = 2π/ω where ω is a constant related to the system. ∴ \(v_{av}\)=4A\(\frac{ω}{2π}\) But ωA = maximum speed ∴Average speed = \(\frac{2}{π}×\)maximum speed.
Expressions for the period of SHM in terms of (1) angular frequency (2) force constant (3) acceleration. : The general expression for the displacement (x) of a particle performing SHM is x = A sin(ωt + α) (1) Let T be the period of the SHM and x1 the displacement after a further time interval T. Then x1 = A sin[ω(t+T) + α] = A sin(ωt + ωT + α) = A sin(ωt + α + ωT) Since T ≠ 0 , for x1 to be equal to x, we must have (ωT)min = 2π Hence, the period (T) of SHM is T = 2π/ω This is the expression for the period in terms of the constant ω, the angular frequency. (2) If m is the mass of the particle and k is the force constant, ω = \(\sqrt{\frac{k}{m}}\) ∴ T = 2π/ω = \(\frac{2π}{\sqrt{k/m}}\) This is the expression for the period in terms of the force constant. (3) The acceleration of a particle performing SHM has a magnitude a = ω2x ∴ ω = \(\sqrt{a/x}\) = \(\sqrt{\text{acceeration per unit displacement}}\) ∴ T = 2π/ω = \(\frac{2π}{\sqrt{\text{acceeration per unit displacement}}}\)
Frequency of an SHM vary with (i) the force constant k (ii) the mass of the particle performing SHM : The frequency of a particle of mass m performing SHM is η = 1/T = \(\frac{1}{2π}\sqrt{k/m}\) (i) ∴ η ∝ \(\sqrt{k}\) Thus, the frequency of an SHM is directly proportional to the square root of the force constant of the motion. (ii) ∴ η ∝ \(\sqrt{1/m}\) Thus, the frequency of an SHM is inversely proportional to the square root of the mass of the particle performing SHM.
Q. State at which point during an oscillation the oscillator has zero velocity but positive acceleration ?
At the left extreme, i.e., x = −A, so that a = − ω2x = − ω2 (− A) = ω2A = amax
Q. During which part of the simple harmonic motion velocity is positive but the displacement is negative, and vice versa?
Velocity v is positive (to the right) while displacement x is negative when the particle in SHM is moving from the left extreme towards the mean position. Velocity v is negative (to the left) while displacement x is positive when the particle in SHM is moving from the right extreme towards the mean position.
Q. During which part of the oscillation the two are along the same direction?
Both v and x are positive when the particle is moving from the mean position towards the right extreme. Both v and x are negative when the particle is moving from the mean position towards the left extreme.
Combination of springs: A number of springs of different spring constants in (i) a series combination (ii) a parallel combination of springs or both.
Series combination (Figure A): In this case, all the springs are connected one after the other forming a single chain. Consider an arrangement of two such springs of spring constants k1 and k2.
If the springs are massless, each will have the same stretching force as F. For vertical arrangement, it will be the weight mg, F=mg .
If x1 and x2 are the respective extensions, we can write,
F = k1x1 = k2x2 = \ x1= F/k1 and x2 = F/k2
The total extension is x = x1+ x2 = F\(\frac{1}{k_1}+\frac{1}{k_2}\)

If ks is the effective spring constant (as if there is a single spring that gives the same total extension for the same force), we can write,
x = \(\frac{F}{k_s}\) = F\((\frac{1}{k_1}+\frac{1}{k_2})\)
For a number of such (massless) springs, in series, spring constants, k1, k2, k3, ….kN
\(\frac{1}{k_s}\) = \(\frac{1}{k_1}+\frac{1}{k_2}+.....+\frac{1}{k_N}\) = \(\sum_{i=1}^{N}k_i\)
For only two massless springs of spring constant k each, in series,
ks = \(\frac{k_1k_2}{k_1+k_2}=\frac{product}{sum}\)
For N such identical massless springs, in series, ks = k/N
Parallel combination (Figure B): In such a combination, all the springs are connected between same two points, one of them is the support and at the other end, the stretching force F is applied at a suitable point. Irrespective of their spring constants, each spring will now have the same extension x. The springs now share the force such that in the equilibrium position, the total restoring force is equal and opposite to the stretching force F. Let F1 = k1x, F2 = k2x………. be the individual restoring forces. If kP is the effective spring constant, a single spring of this spring constant will be stretched by the same extension x, by the same stretching force F. ∴ F = kPx = F1+F2+ ….. = k1x+ k2x +…. ∴ kP = k1 + k2 +…. = \(\sum k_i\) For N such identical massless springs of spring constant k each, in parallel, kP = Nk

Reference Circle Method (SHM as projection of a UCM)

Figure shows a rod rotating along a vertical circle in the x-y plane, the rod is illuminated parallel to x-axis from either side by a linear source parallel to the rod, as shown in the Fig. the shadow (projection) of the rod will be produced on the y-axis. The tip of this shadow can be seen to be oscillating about the origin, along the y-axis.
We shall now prove that motion of the tip of the projection is an S.H.M. if the corresponding motion of the tip of the rodis a U.C.M. For this, we should take the projections of displacement, velocity, etc. on any reference diameter and confirm that we get the corresponding quantities for a linear S.H.M.
Linear SHM is the projection of a uniform circular motion on its diameter : Consider a particle which moves anticlockwise around a circular path of radius r with a constant angular speed w (Fig). Let the path lie in the x-y plane with the centre at the origin O. The instantaneous position P of the particle is called the reference point and the circle in which the particle moves as the reference circle. The perpendicular projection of P onto the y-axis is Q. Then, as the particle travels around the circle, Q moves to-and-fro along the y-axis. Line OP makes an angle a with the x-axis at t= 0. At time t, this angle becomes θ = ωt + α. The projection Q of the reference point is described by the y-coordinate, y = OQ = OP sin ∠OPQ, Since ∠OPQ = ωt + α. y = r sin(ωt + α.) which is the equation of a linear SHM of amplitude A. The angular frequency w of a linear SHM can thus be understood as the angular velocity of the reference particle. Projection of velocity: The tangential velocity of the reference particle is v = ωr. Its y-component at time t is‘ vy = ωr sin (90°− θ) = ωr cos θ vy = ωr cos (ωt + α) Projection of acceleration: The centripetal acceleration of the reference particle is ar = ω2r , so that its y-component at time t is ax = ar sin ∠OPQ ∴ ax = − ω2r sin (ωt + α) = − ω2y

Phase in SHM :
Phase of simple harmonic motion (SHM) represents the state of oscillation of the particle performing SHM, i.e., it gives the displacement of the particle, its direction of motion from its equilibrium position and the number of oscillations completed.
The displacement of a particle in SHM is given by x=A sin (ωt + α). The angle (ωt + α) is called the phase angle or simply the phase of SHM. The SI unit of phase angle is the radian (symbol, rad).
Epoch : Epoch of simple harmonic motion (SHM) represents the initial phase of the particle performing SHM, i.e., it gives the displacement of the particle and its direction of motion at time t = 0.
If xo is the initial position of the particle, i.e., the position at time t=0, x0= Asin α or α =sin-1(x0/A)
(xo / A). The angle a, therefore, determines the initial state of the particle. Hence, the angle a is the epoch or initial phase or phase constant of SHM.
Special cases: [θ= (ωt + α)]
Graphical Representation of S.H.M.:
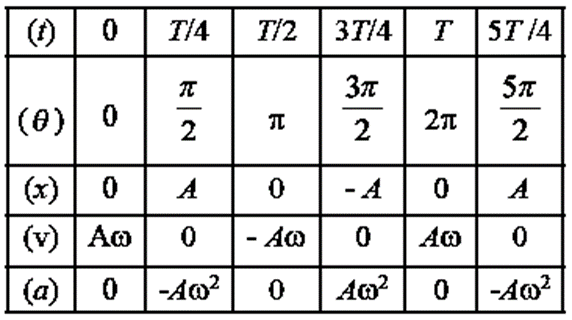
(a) Particle executing S.H.M., starting from mean position, towards positive: Consider a particle performing SHM, with amplitude A and period T = 2π/ω starting from the mean position towards the positive extreme position where w is the angular frequency. Its displacement from the mean position (x), velocity (v) and acceleration (a) at any instant are x = A sin ωt = A sin\(\frac{2π}{T}t\) (...ω = 2π/T) v = dx/dt = ωA cosωt = ωA cos\(\frac{2π}{T}t\) a = dv/dt = − ω2A sin ωt = − ω2A sin\(\frac{2π}{T}t\) as the initial phase α = 0 Using these expressions, the values of x, v and α at the end of every quarter of a period, starting from t = 0, are tabulated below. Using the values in the table we can plot graphs of displacement, velocity and acceleration with time (see Fig below). Fig-Graphs of displacement, velocity and acceleration with time for a particle in SHM starting from the mean position Conclusions from the graphs:

(b) Particle performing S.H.M., starting from the positive extreme position : Consider a particle performing SHM, with amplitude A and period T = 2π/ω starting from the mean position towards the positive extreme position where w is the angular frequency. Its displacement from the mean position (x), velocity (v) and acceleration (a) at any instant are (α = π/2) x = A sin (ωt+π/2) = A cos ωt = A cos (ω = 2π/T) v = dx/dt = −ωA sin ωt = −ωA sin a = dv/dt = −ω2A cos ωt = −ω2A cos Using these expressions, the values of x, v and a at the end of every quarter of a period, starting from t = 0, are tabulated below. […θ= (ωt + α), at ωt=0, θ=(0+π/2)= π/2 …….] Using the values in the table we can plot graphs of displacement, velocity and acceleration with time (see Fig below). Conclusions : Explanations : (1) v—t graph : It is a sine curve, i.e., the velocity is a periodic (harmonic) function of time which repeats after a phase of 2π rad. There is a phase difference of π/2 rad between a and v. v is minimum (equal to zero) at the extreme positions (i.e., at x=±A) and v is maximum ( = ±ωA) at the mean position (x = 0). (2) a—-t graph : It is a cosine curve, i.e., the acceleration is a periodic (harmonic) function of time which repeats after a phase of 2π rad. There is a phase difference of p rad between v and a. a is minimum (equal to zero) at the mean position (x = 0) and a is maximum (=±ω2A) at the extreme positions (x = ± A).



Composition of two S.H.M.s having same period and along the same path:
Consider a particle subjected simultaneously to two S.H.M.s having the same period and along same path (let it be along the x-axis), but of different amplitudes and initial phases. The resultant displacement at any instant is equal to the vector sum of its displacements due to both the S.H.M.s at that instant.
Equations of displacement of the two S.H.M.s along same straight line (x-axis) are
x1 = A1 sin (ωt + α) and x2 = A2 sin (ωt + β),
where A1 and A2 are the amplitudes, and αand β are the initial phases of the two SHMs.
According to the principle of superposition, the displacement of the particle at any instant t is the algebraic sum _x = x1 + x2.
x = A1 sin (ωt + α) + A2 sin (ωt + β)),
= A1 sin ωt cos α + A1 cos ωt sin α + A2 sin ωt cos β + A2 cos ωt sin β
= (A1 cos α + A2 cos β) sin ωt + (A1 sin α + A2 sin β) cos ωt
Let A1 cos α+ A2 cos β = R cos δ……(1)
And A1 sin α + A2 sin β = R sin δ ...(2)
x = R cos δ sin ωt + R sin δ cos ωt
x = R sin (ω + δ) …..(3)
Equation (3), which gives the displacement of the particle, shows that the resultant motion is also simple harmonic, along the same path as the SHMs superposed, with the same mean position, and amplitude R and initial phase d but having the same period as the individual SHMs.
Amplitude R of the resultant motion : The resultant amplitude R is found by squaring and adding Eqs. (1) and (2).
R2 = R2 cos2δ + R2 sin2δ
= (A1 cos α + A2 cos β)2 + (A1 sin α + A2 sin β)2
= A12 cos2α + A22 cos2 β +2A1A2 cos α cos β +A12 sin2α +A22 sin2β +2A1A2 sin α sin β
= A12 (cos2α + sin2α) + A22(cos2 β + sin2 β) + 2A1A2(cos α cos β + sin α sin β)
∴ R2 = A12 + A22 + 2A1A2(cos α − β)
∴ R = \(\sqrt{A_1^2+A_2^2+2A_1A_2(cosα − β)}\) ……(4)
Initial phase d of the resultant motion : The initial phase of the resultant motion is found by dividing Eq. (2) by Eq. (1).
\(\frac{Rsinδ}{Rsinδ} = tanδ = \frac{A_1sinα+A_2sinβ}{A_1cosα+A_2cosβ}\)
δ = \(tan^{-1}(\frac{A_1sinα+A_2sinβ}{A_1cosα+A_2cosβ})\) ……..(5)
Now, consider Eq. (4) for R.
Case (1) : Phase difference, or α − β = 0°
∴ cos (α − β) = 1
∴ R = \(\sqrt{A_1^2+A_2^2+2A_1A_2}\) = A1 + A2
Case (2) : Phase difference, α − β =π/3 rad
∴ cos (α − β) = 1/2
∴ R = \(\sqrt{A_1^2+A_2^2+A_1A_2}\)
Case (3) : Phase difference, α − β =π/2 rad
∴ cos (α − β) = 0
∴ R = \(\sqrt{A_1^2+A_2^2}\)
∴Case (4) : Phase difference, α − β =π rad
∴ cos (α − β) = −1
∴ R = \(\sqrt{A_1^2+A_2^2-2A_1A_2}\)
∴ R = |A1 − A2|
- Since the displacements due to the superposed linear SHMs are along the same path, their vector sum can be replaced by the algebraic sum.
- To determine d uniquely, we need to know both sin d and cos d.
We reply to valid query.